Angular Momentum:
The angular momentum of a particle about a fixed point is defined by the moment of linear momentum of the particle about that fixed point.
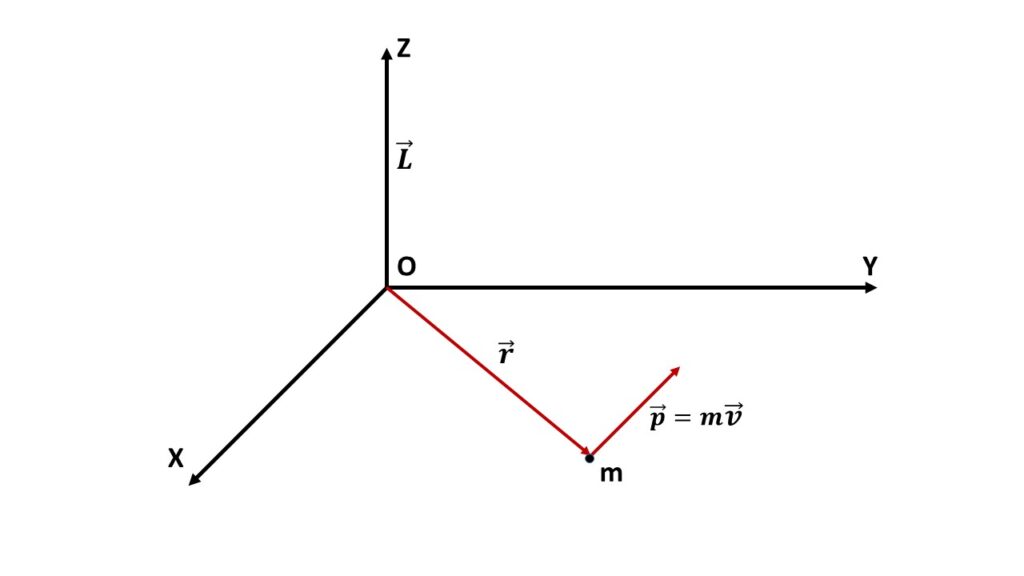
If \( \vec{r} \) be the position vector of a particle of mass \( m \) with respect to the fixed point O and \( \vec{p} \) be the linear momentum of that particle then, the angular momentum is defined by,
\( \vec{L}=\vec{r}\times\vec{p}\tag{1} \)
If the particle is moving with the velocity \( \vec{v} \), then the linear momentum \( \vec{p}=m\vec{v} \). So the equation (1) will be,
\( \vec{L}=\vec{r}\times{m\vec{v}}\tag{2} \)
The direction of \( \vec{L} \) is perpendicular to the plane containing \( \vec{r} \) and \( \vec{v} \) or \( \vec{p} \), according to the rule of right hand screw for the cross product of two vectors.
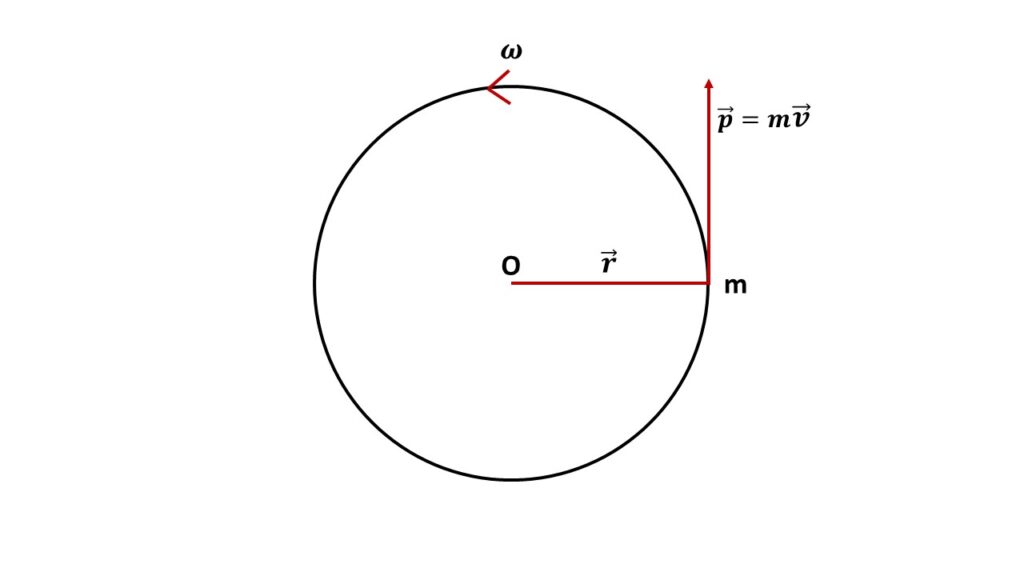
Let us consider particle of mass \( m \) moves in a circular path of radius \( r \) with angular velocity \( \omega \), so we can write that the linear velocity \( v=r\omega \). The angular momentum \( \vec{L}=\vec{r}\times{m\vec{v}} \).
So the magnitude of angular momentum is
\( |\vec{L}|=rmv=rm(r\omega)\\=mr^2\frac{d\theta}{dt}\\=mr^2\dot{\theta} \),
where \( \theta \) is the angular displacement.
Torque:
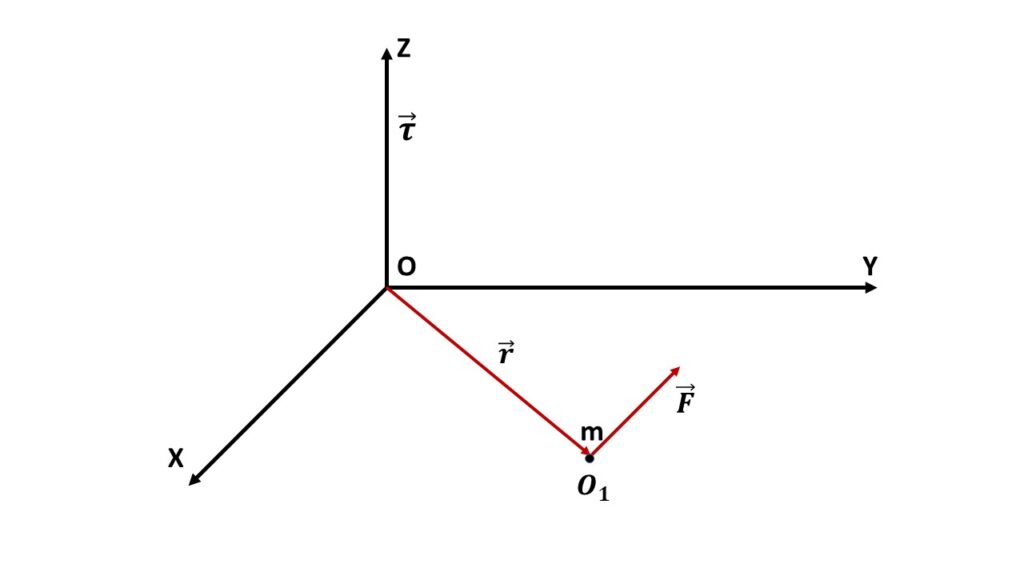
Let us consider \( \vec{F} \) be the force acting on a particle of mass \( m \) at the point \( O_1 \), whose position vector is \( r \) with respect to the origin \( O \).
Now the torque acting on this particle about the origin \( O \) is defined as
\( \vec{\tau}=\vec{r}\times\vec{F} \)
The direction of the torque is normal to the plane containing \( \vec{r} \) and \( \vec{F} \), according to the right hand screw rule for the cross product of two vectors.