Ans.
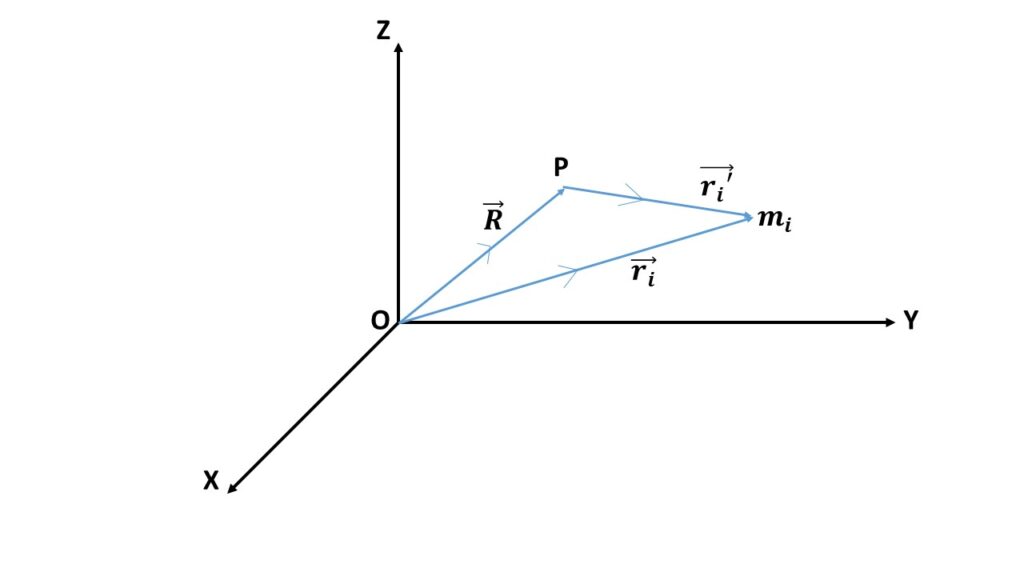
Let us consider a system of n particles of masses \( m_1 \), \( m_2 \), \( \cdots \), \( m_n \) having position vector \( \vec{r_1} \), \( \vec{r_2} \), \( \cdots \), \( \vec{r_n} \) with respect to the origin O. Let P be the centre of mass of the system having position vector \( \vec{R} \) with respect to the origin O is given by,
\( \vec{R}=\frac{1}{M}\displaystyle{\sum_{i=1}^{n}m_i\vec{r_i}}\tag{1} \)
where, \( \vec{r_i} \) is the position vector of the ith particle of mass \( m_i \), and \( \displaystyle{M=\sum_{i=1}^{n}m_i} \) is the total mass of the system.
Let, \( \vec{r_i}’ \) be the position vector of the ith particle of mass \( m_i \) with respect to the centre of mass point P, then from Fig. 1 we can write,
\( \vec{r_i}=\vec{R}+\vec{r_i}’\tag{2} \)
differentiating both side with respect to the time t, we get
\( \frac{d\vec{r_i}}{dt}=\frac{d\vec{R}}{dt}+\frac{d\vec{r_i}’}{dt} \)
or, \( \vec{v_i}=\vec{V}+\vec{v_i}’\tag{3} \)
Where, \( \vec{V} \) is the velocity of the centre of mass P with respect to the origin O, \( \vec{v_i} \) is the velocity of the ith particle with respect to the origin O and \( \vec{v_i}’ \) is the velocity of the ith particle with respect to the centre of mass point P.
So the total angular momentum of the system relative to the origin O is given by,
\( \vec{L}=\displaystyle{\sum_{i=1}^{n}}m_i(\vec{r_i}\times\vec{v_i}) \)
= \( \displaystyle{\sum_{i=1}^{n}}m_i[(\vec{R}+\vec{r_i}’)\times(\vec{V}+\vec{v_i}’)] \)
= \( \displaystyle{\sum_{i=1}^{n}}m_i[\vec{R}\times\vec{V}]+\vec{R}\times[\displaystyle{\sum_{i=1}^{n}}m_i\vec{v_i}’]+[\displaystyle{\sum_{i=1}^{n}}m_i\vec{r_i}’]\times\vec{V}+\displaystyle{\sum_{i=1}^{n}}m_i[\vec{r_i}’\times\vec{v_i}’] \)
= \( M(\vec{R}\times\vec{V})+\displaystyle{\sum_{i=1}^{n}}m_i[\vec{r_i}’\times\vec{v_i}’] \)
Where, \( \displaystyle{\sum_{i=1}^{n}}m_i\vec{v_i}’=0 \) and \( \displaystyle{\sum_{i=1}^{n}}m_i\vec{r_i}’=0 \)
Since centre of mass point P of the system coincide with the origin O, then \( \vec{R}=0 \)
Therefore, \( \vec{L}=\displaystyle{\sum_{i=1}^{n}}m_i[\vec{r_i}’\times\vec{v_i}’] \)